九州工業大学 榎田修一 教授
現在注目されている技術の1つに「自動車の自動運転」がある。一口に自動運転といっても、当然ながら、そこにはさまざまな技術が用いられている。今回は自動運転時に周囲の状況を「認知」する技術についての研究を行っている、九州工業大学の榎田修一教授にお話を聞いた。
自動運転レベルとその実現
――内閣官房が、自動運転技術の実現に向けて「官民ITS構想・ロードマップ」というものを出していますね。
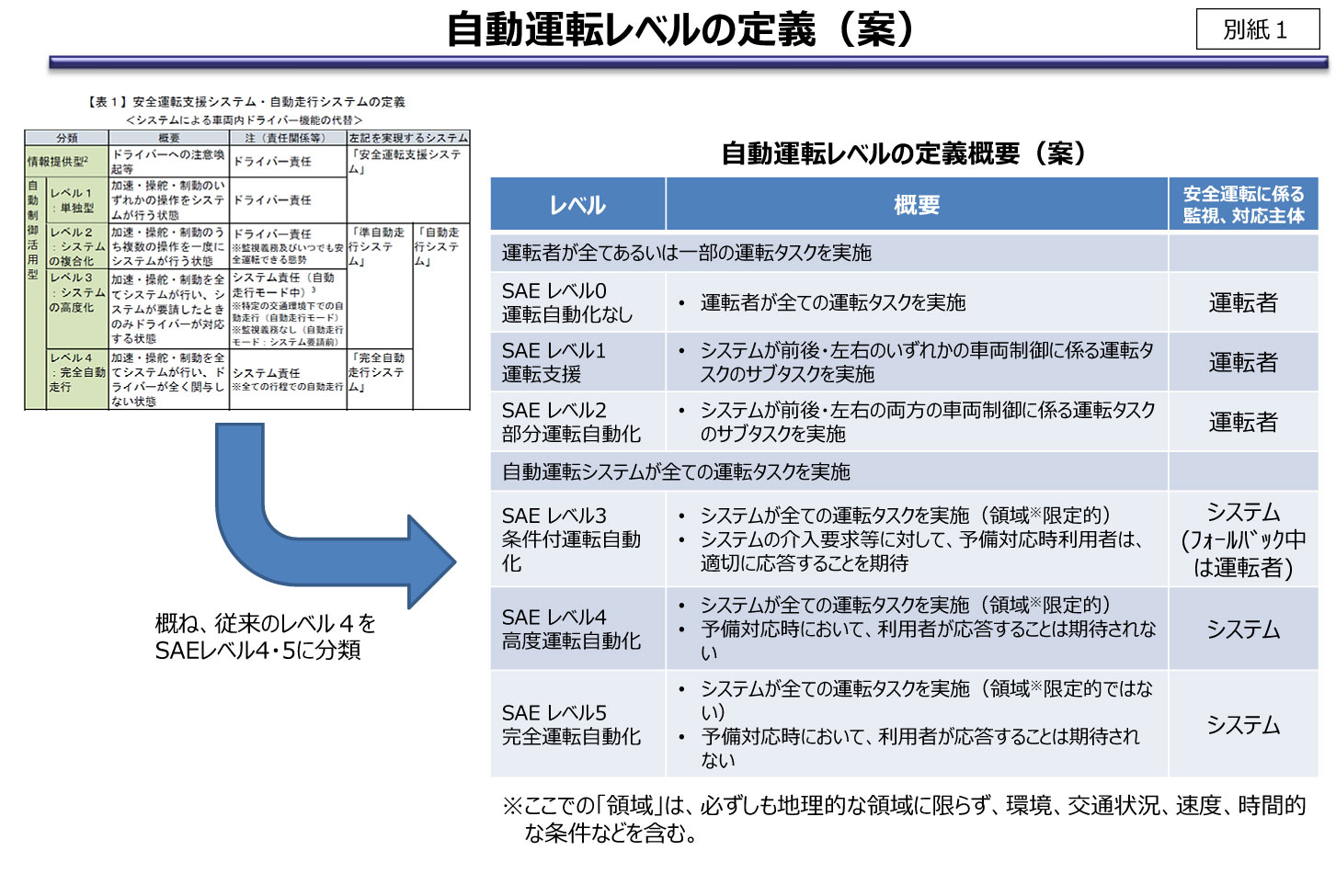
自動運転レベルの定義(案)
※クリックで拡大
榎田 国際的なお披露目の場という意味で、「東京オリンピック」という避けられないポイントがありまして、2020年までには自動運転の、おそらく自家用車ではなくてバスのようなものを走らせたいと考えていると思います。
そのなかで、自動運転システムをレベル分けして、段階的に自動運転化を目指していこうとしています【参照:自動運転レベルの定義(案) 】。
レベルに関しては、これまで日本は独自で5段階のレベル分けをしていましたが、自動運転技術は世界中で開発されていますから、世界での共通認識として「どこまで開発できたか」を「SAE」という基準で統一しようとしているところです。ロードマップで20年までに目指すとされている「日本のレベル3」は「SAEレベル3」に該当します。
簡単に説明しますと、「レベル0」は人間による通常の運転です。自動車を動かすのは運転者。
「レベル1」は運転者が運転をするけれど、運転に対して簡単な支援をしてくれる。定義の概要の書き方だとわかりにくいですが、「前後」はアクセルとブレーキ、「左右」はハンドル操作のことです。そのいずれかを支援してくれるというものです。例えば、すでに市販車に搭載されている「ぶつかりそうになったら警告音が鳴りながら止まる機能」はレベル1に相当します。
「レベル2」は、アクセル・ブレーキ・ハンドル操作を同時に行う運転支援。これも、すでに市販されている「渋滞のときに先行車についていく機能」といえばわかりやすいでしょうか。
「レベル3」は、周囲の環境さえ認識できれば、領域を限定した状態下で、システム側が運転タスクを実施するというものです。決められたコースのなかをバスがぐるぐる回っているとして、その運転をある程度自動化してしまうというイメージです。
ただし、その自動運転しているバスにも運転手が乗っている必要があります。例えば「センサーが壊れた」「急な土砂降りで周辺の環境を正確に認識できない」といった状態をシステムが感知し、「もうシステム側では安全に運転できません」と判断した際は、即座に運転手に運転の権限が戻されます。このレベル3が、基本的には20年までに目指されている自動運転だと思っています。
――自動車ではないですが、レールという限られた環境下で自動運転を行っている「ゆりかもめ」のようなイメージでしょうか。
榎田 ゆりかもめは運転手がその場にいないですよね。これを自動車で実現すると「レベル4」の「高度運転自動化」にあたります。レベル4では、システムがすべての運転タスクを実施します。
例えば、何らかの異常を検知してゆりかもめが止まったときに、乗客は基本的に何もしなくていい。システムを管理している人(ゆりかもめの場合は中央指令所)がコントロールしている。
バスで例えるなら、レベル3までは運転手を座らせる必要があるけれど、レベル4の自動運転バスには誰も座らなくていい。路上に何かあって危ないとバスが止まり、それ以上自動運転が難しいと判断したら、その情報を管理センターに送って、管理センターが遠隔操作で運転の続きを引き継ぐ。急に乗客に運転してくださいということにはならない。レベル3までは必ず搭乗していた運転者がいなくなって、レベル4からは車内には利用者だけとなります。
――レベル3と4の間には、大きな差がありますね。
榎田 SAEレベルの4と5は、過去日本が掲げていたレベル4が細分化したようなものなので、ロードマップが大きく変わることはないと思います。日本のレベル4を「領域を限定的にする」と「領域を限定しない」に分けたものがSAEのレベル4と5です。
ただ、レベルを分けるメリットは目標が明確になることですが、ゼロから順番に積み上げていく必要はないのです。
実はレベル3に一番大きな谷があります。自動運転中に異常が発生したら運転手に運転の権限を戻すというけれど、そのときに運転手が居眠りしているかもしれないし、もしかしたら急病か何かで運転できない状態かもしれない。レベル3では運転の制御と同時に運転手の状況もモニタリングする必要もあり、「適切に運転手に戻す」という部分の技術も考える必要があって大変なのです。
――システム側が、運転以外に車内の状況まで判断しなければならないわけですね。状況が多岐に渡りすぎて判断が難しそうです。
榎田 そういう意味で、実はレベル4の方こそ早期実現の可能性があるのではないかと考えています。運転手がいないわけですから、運転の安全に関しては運転運営者を二重三重にしたり、システム側を強化しておけばいいわけです。今はレベル2までが市販化されていますが、急にレベル4が実現する可能性もありますね。東京オリンピックのときに走っている自動運転車はこういうかたちかもしれません。
――状況が限定的であるならば、レベル4の方が実現しやすい部分があるんですね。
榎田 レベル3と4に関してはどちらも「領域は限定的」となっていますし、どちらが先に実現するかはわからないと個人的には思っています。
(つづく)
【取材・文:犬童範亮】
<PROFILE>
榎田修一(えのきだ・しゅういち)
1974年、福岡県太宰府市生まれ。九州工業大学 大学院情報工学研究院 知能情報工学研究系 教授。研究分野はパターン認識、画像処理、画像解析。
 榎田修一(えのきだ・しゅういち)
榎田修一(えのきだ・しゅういち)法人名
関連記事